用SSI協(xié)議是如何實(shí)現(xiàn)的
絕對值編碼器?
近年來,編碼器得到了廣泛的應(yīng)用,主要用于工業(yè)控制系統(tǒng),如電機(jī)速度測量、機(jī)床位置測量、起重機(jī)爬升距離測量等。與此同時,編碼器在市場上的規(guī)模越來越大,工業(yè)需求也在增長。在未來幾十年,編碼器行業(yè)將達(dá)到快速發(fā)展的階段,更多的編碼器制造商將參與這場革命的競爭。
編碼器是一種將數(shù)據(jù)轉(zhuǎn)換為信號形式的設(shè)備,可用于通信、傳輸和存儲。編碼器的原理是將這些物理位移轉(zhuǎn)換為已知的電信號。根據(jù)工作類型的不同,編碼器可分為兩類:增量編碼器和絕對編碼器。增量編碼器主要用于精度要求較低的儀器。絕對編碼器通常用于具有高精度要求的行業(yè),如設(shè)備制造和電子產(chǎn)品。由于絕對編碼器具有啟動速度快、數(shù)字編碼和位置獨(dú)特的特點(diǎn),因此被廣泛應(yīng)用于各種工業(yè)系統(tǒng)。隨著儀器儀表的日益智能化,人們對低功耗、高質(zhì)量、小尺寸的旋轉(zhuǎn)編碼器提出了要求。他們希望在絕對編碼器領(lǐng)域有更多類型的輸出方法,以便越來越多的設(shè)備能夠?qū)崿F(xiàn)自動化。
在早期,絕對編碼器的輸出大多使用并行輸出方法。然而,隨著技術(shù)的進(jìn)步,絕對編碼器的輸出方式越來越多樣化,如RS-485、PROFIBUS DP、CAN、DeviceNet等現(xiàn)場總線輸出方式,模擬信號轉(zhuǎn)換輸出方式和SSI協(xié)議同步串行輸出方式。這些輸出方法都有各自的優(yōu)點(diǎn)和缺點(diǎn)。并聯(lián)輸出適用于短距離傳輸,價格相對較低;現(xiàn)場總線電源通常適用于大型工業(yè)領(lǐng)域,但相對昂貴;然而,模擬信號轉(zhuǎn)換和輸出方法的使用目前相對有限。與這些輸出方法相比,SSI串行輸出方法具有抗干擾性強(qiáng)、布線少等優(yōu)點(diǎn),在市場上得到了廣泛的應(yīng)用。
增量編碼器的工作原理
增量編碼器的工作原理是首先將位移轉(zhuǎn)換為周期性電信號,然后將該信號轉(zhuǎn)換為計(jì)數(shù)脈沖。通過這種轉(zhuǎn)換,可以測量脈沖輸出的高度的位移。如圖所示,相位A相位B顯示正向旋轉(zhuǎn),反之亦然。增量編碼器主要依靠計(jì)數(shù)來記住它們的位置,但當(dāng)編碼器稍微移動時編碼器突然關(guān)閉時,當(dāng)有另一個當(dāng)前調(diào)用時,內(nèi)存的零點(diǎn)會移動,導(dǎo)致不準(zhǔn)確和內(nèi)存丟失。我們需要添加一個參考點(diǎn),即Z相位,并使用該參考位置來解決這些問題。然而,這種類型的編碼器必須首先為每個具有較差抗擾度和零點(diǎn)累積誤差的操作找到參考點(diǎn)。如果使用絕對編碼器,則可以解決這些問題。

絕對值編碼器的工作原理
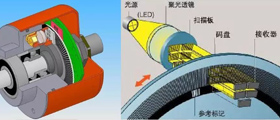
絕對編碼器的碼盤包含許多光通量線,這些光通量線按2行、4行、8行、16行的順序排列。。。已訂購。這些標(biāo)線片有兩個側(cè)面,即負(fù)極和正極。通過讀取每個標(biāo)線片的通邊和暗邊,可以獲得一組20~2n-1的唯一二進(jìn)制碼(格雷碼),這就是n位絕對值生成器。每個位置對應(yīng)一個特定的數(shù)字,這個數(shù)字是絕對唯一的,只指開始和結(jié)束,與任何中間過程都無關(guān)。在突然停電和重新啟動的情況下,參考點(diǎn)和零點(diǎn)以及脈沖數(shù)量都不需要像增量編碼器一樣重新記錄。每當(dāng)你想知道這個地方在哪里,你都可以閱讀。這個編碼器的數(shù)據(jù)可靠,不容易受到外部因素的影響。
什么是SSI協(xié)議?
絕對編碼器主要將待測量的位置信息發(fā)送到主控制器,然后通過主控制器發(fā)送控制信號。以前的絕對編碼器大多使用并行輸出,這可以應(yīng)用于低位計(jì)數(shù)。一旦比特?cái)?shù)量增加,并行輸出就不再適用,因?yàn)榭偸谴嬖诓粶?zhǔn)確的數(shù)據(jù)、故障等。例如,在傳輸過程中,數(shù)據(jù)電纜的任何問題都可能影響最終傳輸?shù)臄?shù)據(jù),從而影響絕對編碼器的正常操作。因此,根據(jù)實(shí)際情況,SSI協(xié)議的輸出方法更為合適。它采用串行輸出而不是并行輸出,利用差分模式提高了傳輸過程中數(shù)據(jù)的可靠性,并顯著提高了抗干擾能力。同時,通信雙方使用相同的波特率來準(zhǔn)確地發(fā)送和接收數(shù)據(jù)。
議?")
SSI協(xié)議的通信模式如圖所示。它采用主動讀接收方式,包括同步時鐘信號clock和數(shù)據(jù)信號data,其中同步時鐘的頻率決定了數(shù)據(jù)傳輸?shù)乃俣取T诠I(yè)控制應(yīng)用領(lǐng)域中,基于實(shí)際傳輸距離來選擇期望的頻率。在同步時鐘信號的控制下,從最高位(MSB)開始傳輸。在時鐘信號的第一個下降沿,要發(fā)送的數(shù)據(jù)在Tp周期期間被存儲,然后在時鐘信號每個上升沿被發(fā)送,直到所有數(shù)據(jù)被發(fā)送。然后將數(shù)據(jù)輸出端拖動到低電平,延長Tm時間,然后將數(shù)據(jù)輸入端拖動到高電平,準(zhǔn)備等待下一個時鐘信號并繼續(xù)發(fā)送數(shù)據(jù)。如果沒有發(fā)送數(shù)據(jù),則時鐘信號和數(shù)據(jù)端子都應(yīng)保持高電平。圖2 SSI通信協(xié)議
發(fā)送數(shù)據(jù)所需的位數(shù)決定了要發(fā)送的同步時鐘的數(shù)量。圖2中的參數(shù)定義如下:T是時鐘頻率,Tp是數(shù)據(jù)之間的傳輸間隔,Tm是單穩(wěn)態(tài)觸發(fā)時間,n是傳輸位,MSB是最高有效位,LSB是最低有效位。
采用SSI接口的絕對值編碼器系統(tǒng)方案設(shè)計(jì)
主控制器可以在51芯片微控制器、RAM微處理器和CPLD邏輯器件之間進(jìn)行選擇。微控制器結(jié)構(gòu)簡單,價格低廉,但運(yùn)行速度慢,處理速度有限,抗干擾能力不是很強(qiáng);RAM微處理器具有強(qiáng)大的功能,但其開發(fā)周期長,價格昂貴。為了實(shí)現(xiàn)高速傳輸,采用CPLD設(shè)計(jì)相對靈活,處理速度快,抗干擾能力強(qiáng),設(shè)計(jì)時需要大量的時序和邏輯運(yùn)算。
硬件設(shè)計(jì)
SSI電路的輸入和輸出采用差分模式,如圖所示。有四條信號線:CLK+、CLK-DATA+和DATA-,其中CLK+和CLK點(diǎn)是時鐘輸入,DATA+和DATA點(diǎn)是數(shù)據(jù)輸出。時鐘輸入端通過光耦接收,數(shù)據(jù)端通過422輸出芯片輸出。 SSI電路設(shè)計(jì)框圖
計(jì)圖") 軟件設(shè)計(jì)
軟件設(shè)計(jì)
對于軟件部分的設(shè)計(jì),SSI協(xié)議的實(shí)現(xiàn)有兩種方法:一種方法是使用微控制器模擬SSI通信,另一種方法則是使用CPLD實(shí)現(xiàn)SSI通信。微控制器仿真的關(guān)鍵技術(shù)主要包括兩個方面:同步時鐘信號的準(zhǔn)確獲取和數(shù)據(jù)起始位的準(zhǔn)確確定。顯然,這需要輸入和輸出端口,以及一個定時器來實(shí)現(xiàn)單穩(wěn)態(tài)觸發(fā)器。在輸入端口捕獲手表的上升脈沖,當(dāng)計(jì)時器碰到手表的第一個下降脈沖時,計(jì)時器開始工作。在數(shù)據(jù)傳輸結(jié)束時,必須重置計(jì)時器才能重新開始計(jì)數(shù)。軟件流程圖如圖所示。

使用微控制器模擬SSI通信具有相對簡單的結(jié)構(gòu),但通信速度有限。為了實(shí)現(xiàn)高速通信,必須使用CPLD。
了解更多
編碼器相關(guān)知識,敬請關(guān)注西安德伍拓自動化傳動系統(tǒng)有限公司網(wǎng)站。公司技術(shù)團(tuán)隊(duì)為您免費(fèi)提供編碼器的選型、安裝、調(diào)試、保養(yǎng)等技術(shù)指導(dǎo)服務(wù),盡量避免企業(yè)因?yàn)榫幋a器技術(shù)人員的短缺帶來的損失,采取拉線上+拉線下服務(wù)的服務(wù)形式,幫助企業(yè)解決技術(shù)難題。








有限公司")
 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn