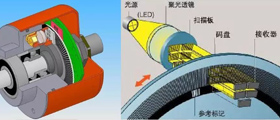
編碼器同步步進電機案例解析
該設備使用步進電機和圓形皮帶驅動裝有編碼器的軸
在旋轉軸上有一個用于風扇葉片的動態(tài)平衡檢測系統(tǒng)。在以1300轉/分的速度運行一段時間后,動態(tài)平衡系統(tǒng)計算偏差角度,并允許PLC在此角度插入金屬板配重

這種動平衡系統(tǒng)要求轉軸和梯級不能剛性連接,也不能由同步帶控制。只能使用未完全同步的圓肋帶進行控制。
高速運行后,編碼器的角度和步進輪的角度之間存在顯著偏差
旋轉編碼器的功能之一是做出妥協(xié)并旋轉到旋轉編碼器的固定角度位置,扭轉并松開風扇葉片和軸的安裝螺釘。
第二步是根據(jù)計算的角度和測量后編碼器的實際位置,以直角插入芯片
現(xiàn)在編碼器同步步進電機有幾個問題如下:
首先,其中一個原因是編碼器的分辨率太高,旋轉了3600行。如果速度超過10Khz,脈沖就會丟失。X0和X1仍然增加了1.5K電阻器,編碼器電纜有點長,長度為5/6米。
其次,即使脈沖在低速下沒有丟失,Z-Phase X10的預設輸入也被設置為零。在以不同速度旋轉一圈后,編碼器值SD4500 DHCMOV被設置為當前地址SD5500,然后鎖定螺釘?shù)慕嵌任恢帽辉O置
第三,由于沒有使用正時皮帶,加工后的齒輪的從動輪可能不完全一致,當控制步驟旋轉一圈時,編碼器值較低,并且旋轉次數(shù)越多,偏差越大
我最初的想法是在執(zhí)行定位之前,將編碼器值dhcmov校正到步驟的當前位置。
但在執(zhí)行過程中可能會出現(xiàn)偏差,我不知道如何應對。
速度為1300速、速度為3600行的編碼器可以直接輸出小于78K的數(shù)據(jù),這根本不算高速。即使脈沖丟失,也可以通過更換差分輸入來解決。簡單地說,這是一個可以用金錢解決的問題。
但因為我不知道為什么你的“平衡檢測系統(tǒng)”使用非剛性傳動,似乎剩下的問題無法分析,剩下的都是猜測~
如果是為了增加傳感器的自由度,這意味著TDU不受剛性傳動機構的支撐,誤差直接得到補償,這不是一個電氣解決方案,這取決于原始設計,然而,如果橡膠帶不夠牢固,那么你的傳動系統(tǒng)幾乎是一個不準確的系統(tǒng),并且必須基于激勵來測量不準確的系統(tǒng)。
還有另一種純非接觸式傳輸,磁性傳輸,但它也有支持,所以它可能無法解決您的問題。相反,您可以從測量開始,即編碼器連接。例如,如果切換到絕對編碼器,至少絕對位置不取決于激勵源,即階躍旋轉位置。它是自固定的,進給停止在哪個位置或這個位置,然后我們可以根據(jù)停止位置和所需位置進行補償,差不多就可以解決問題了。
了解更多
電機編碼器相關知識,敬請關注西安德伍拓自動化傳動系統(tǒng)有限公司網(wǎng)站。公司技術團隊為您免費提供編碼器的選型、安裝、調試、保養(yǎng)等技術指導服務,盡量避免企業(yè)因為編碼器技術人員的短缺帶來的損失,采取“拉線上+拉線下”服務的服務形式,幫助企業(yè)解決技術難題。


有限公司")
 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn