機器視覺系統(tǒng)的組成、原理,以及實際應(yīng)用。
機器視覺用于各種工業(yè)過程,例如材料檢測、物體識別、模式識別、電子元件分析,以及簽名、光學(xué)字符和貨幣的識別。
機器視覺是計算機感知環(huán)境的能力。一臺或多臺攝像機用于模數(shù)轉(zhuǎn)換和數(shù)字信號處理。圖像數(shù)據(jù)被發(fā)送到計算機或機器人控制器。
人眼對 390 到 770 納米的電磁波長有反應(yīng),而攝像機可以感知比此范圍更廣的波長范圍,而某些機器視覺系統(tǒng)在紅外線、紫外線或 X 射線波長下工作。
機器視覺通常與計算機的視覺能力相關(guān)聯(lián)。計算機視覺一詞用于指定計算機將圖像數(shù)字化、處理數(shù)據(jù)并采取某種行動的技術(shù)。
機器視覺系統(tǒng)使用機器人中的傳感器在計算機的幫助下查看和識別物體。機器視覺用于各種工業(yè)過程,例如材料檢測、物體識別、模式識別、電子元件分析,以及簽名、光學(xué)字符和貨幣的識別。
除了材料檢測,機器視覺系統(tǒng)還有其他幾個應(yīng)用。用于視覺庫存控制和管理的系統(tǒng),例如條形碼讀取和計數(shù),通常使用機器視覺系統(tǒng)。工業(yè)產(chǎn)品運行使用機器視覺系統(tǒng)來評估過程中各個階段的產(chǎn)品。甚至食品和飲料制造商也應(yīng)用機器視覺系統(tǒng)來監(jiān)控質(zhì)量。在醫(yī)學(xué)領(lǐng)域,機器視覺系統(tǒng)用于醫(yī)學(xué)成像和檢查程序。
(維基媒體) - 西安德伍拓自動化傳動系統(tǒng)有限公司")
機器視覺系統(tǒng)(維基媒體)
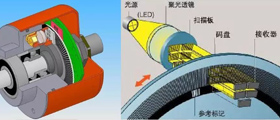
機器人的視覺系統(tǒng)由許多基本組件組成,包括捕獲圖片的相機,以及提供和傳達(dá)結(jié)果的處理機制。對于任何機器視覺系統(tǒng)要可靠地工作并產(chǎn)生可以重復(fù)的結(jié)果,這些基本組件如何相互作用是很重要的。
照明對于機器視覺非常重要,因為它照亮了要查看的部分,使其特征突出,從而使相機能夠清晰地看到。鏡頭捕捉圖像并以光的形式將其傳遞給傳感器。機器視覺相機中的傳感器將這種光轉(zhuǎn)換為數(shù)字圖像,然后將其轉(zhuǎn)發(fā)到處理器進(jìn)行分析。
視覺處理采用算法來審查圖像并提取所需信息,運行所需的檢查并做出決定。最后,通過離散 I/O 信號或通過串行連接傳輸?shù)秸谟涗浕蚴褂眯畔⒌脑O(shè)備的數(shù)據(jù)來完成通信。
有限公司")
RobotWorx - 3D 視覺
機器人的視覺系統(tǒng)根據(jù)物體的顏色分為三個主要類別。這些是(1)二值圖像,由黑白圖像組成; (2) 灰度圖像; (3) 基于紅色、綠色或藍(lán)色顏色的圖像。使用分類為這三類的像素建立電子圖像。如果圖像不屬于這些類別中的任何一個,則選擇最接近圖像的類別。
靈敏度和分辨率是任何視覺系統(tǒng)的重要規(guī)格。靈敏度是機器在弱光條件下觀察或在不可見波長發(fā)現(xiàn)難以察覺的脈沖的能力。分辨率允許機器區(qū)分對象。靈敏度和分辨率是相互依賴的。如果所有其他因素保持不變,則增加靈敏度會降低分辨率,增加分辨率會降低靈敏度。
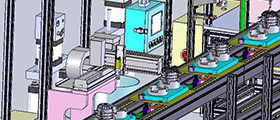
工業(yè)機器人的發(fā)展從根本上提高了生產(chǎn)效率。雖然員工仍然按照計劃更改夾具或設(shè)置,校準(zhǔn)系統(tǒng),并在開始生產(chǎn)前進(jìn)行測試和修改,但視覺引導(dǎo)機器人作為一種消除這種耗時工作的方式一直受到關(guān)注。
大多數(shù)工業(yè)機器人制造商都內(nèi)置了自己的控制程序。如果您正在尋找機器人,請確保您的圖像處理系統(tǒng)與機器人的控制程序兼容。即使使用兼容的系統(tǒng),設(shè)置也可能需要大量時間和勞力。引入視覺引導(dǎo)機器人的基本原理是提高生產(chǎn)效率或降低成本。因此,如果系統(tǒng)設(shè)置需要額外的時間和人力,那么配置是另一個需要考慮的方面。
如果沒有視覺引導(dǎo)系統(tǒng),機器人就會失明,無法正確處理物體。有些視覺引導(dǎo)機器人可以用最少的勞動力進(jìn)行設(shè)置。它們具有預(yù)定義的設(shè)置,例如拾取、放置和夾點校正。您可以按照相機分辨率和靈敏度設(shè)置的說明進(jìn)行設(shè)置,然后選擇要連接的機器人、校準(zhǔn)、搜索設(shè)置和需要進(jìn)行的糾正措施。
操作員需要使用當(dāng)今傳統(tǒng)工業(yè)機器人的教學(xué)輔助手動識別坐標(biāo)。每次更換目標(biāo)或工具時,都必須重新調(diào)整機器。精度不同,取決于操作員。具有自動校準(zhǔn)功能的視覺引導(dǎo)機器人只需按一下按鈕即可完成校準(zhǔn),無需手動控制。
有些系統(tǒng)可以達(dá)到所需的精度,使用一種搜索工具,即使在復(fù)雜的條件下,也能以極高的精度高速隔離目標(biāo)。它們通過錯位校正、重疊消除和失真校正而堅固。具有陰影校正和噪聲隔離的圖像增強過濾器允許精確檢測和隔離。它們支持多種流程,包括外觀和尺寸檢查,以及基于 OCR 的字符識別。
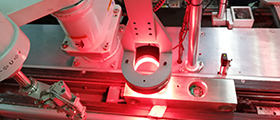
“拾取和放置”是使用視覺引導(dǎo)機器人的常規(guī)操作。對某些產(chǎn)品進(jìn)行的手動裝箱可以使用機器視覺自動識別位置和方向。機器視覺機器人還可以減少揀貨的勞動力。機器視覺用于檢測目標(biāo)的位置并將位置信息發(fā)送給機器人,使其無需使用定位托盤即可完成揀選。在此過程中可以同時檢查產(chǎn)品。
Fanuc 取放機器人 200iD
機器視覺引導(dǎo)系統(tǒng)可以掃描二維或三維物體。 除非應(yīng)用程序需要三維視覺引導(dǎo),否則二維系統(tǒng)運行良好。 購買滿足應(yīng)用需求的最簡單的機器視覺引導(dǎo)系統(tǒng)。
隨著機器視覺系統(tǒng)變得更加強大和緊湊,它們通常會包括跟蹤和可追溯功能,例如藥房應(yīng)用程序,其中每個藥丸和瓶子都在制造過程中被跟蹤。
機器視覺市場已為長期增長做好了準(zhǔn)備。 新的非工業(yè)應(yīng)用正在增長,并且隨著易用性的提高,機器視覺擁有令人興奮的未來。
西安德伍拓自動化傳動系統(tǒng)有限公司在機器視覺領(lǐng)域擁有10多年的項目項目開發(fā)經(jīng)驗,在機器視覺的應(yīng)用領(lǐng)域上有著不少成功的案例和解決方案。公司自成立以來一直以來致力于機器視覺產(chǎn)品的生產(chǎn)、開發(fā)、應(yīng)用以及銷售,為客戶提供整體機器視覺解決方案及服務(wù),把機器視覺技術(shù)應(yīng)用到智能生產(chǎn)中。




有限公司")
有限公司")
 在線QQ
在線QQ 186-2947-6872
186-2947-6872 在線咨詢
在線咨詢

 info@motion-control.com.cn
info@motion-control.com.cn